Six-degrees-of-freedom simulation model for future multi-megawatt airborne wind energy systems
Abstract
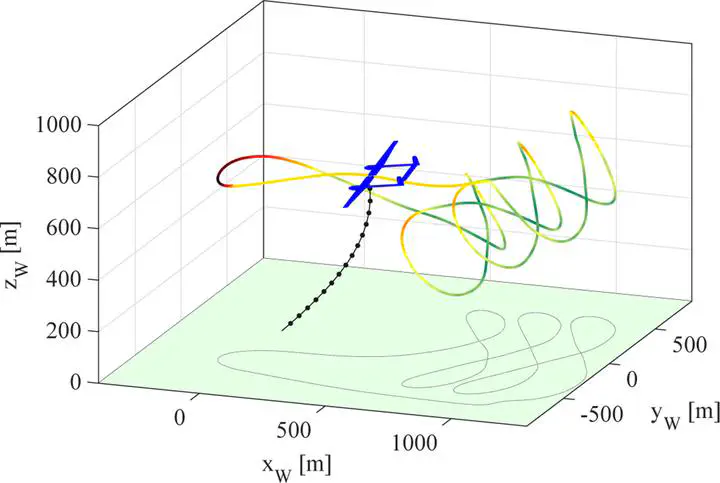
Currently developed airborne wind energy systems have reached sizes of up to several hundred kilowatts. This paper presents the high-level design and a six-degrees-of-freedom model of a future fixed-wing airborne wind energy system operated in pumping cycles. This framework is intended to be used as an open-source reference system. The fixed-wing aircraft has a span of 42.5 m and produces a nominal electrical power of 3 MW. The ground station is modelled as a winch with a rotational degree of freedom describing the reel-in and reel-out motion, constant drum diameter and drive train inertia. A quasi-static approach is used to model the relatively stiff tether. The tether is discretised by 16 segments with variable length to account for reeling. A tracking controller ensures the kite’s flight path during the autonomous pumping cycle operation. The controller alternates between crosswind figure-of-eight manoeuvres while reeling out and gliding on an arc-shaped path towards the ground station during retraction. The operational and controller parameters are determined using a CMA-ES evolution algorithm to maximise the average cycle power of a specific kite design at different wind speeds and given operational constraints. The algorithm identifies optimised flight paths for a range of wind speeds up to 30 m/s leading to a power curve with a cut-in wind speed of 10 m s/s at operating altitude.
Roland Schmehl
Associate Professor
Pursuing all aspects of airborne wind energy research and technology development.